QUESTION1: Find the resistance of a cooper cabel 500 m in length if it has cross sectional area of 2.5mm?
QUESTION2: Name four precautions that should be takinen when selecting /fitting a flixible cord?
QUESTION 3: A 4600watt single phase kilen is supplied by a 3 meter 3 core flex due to volt drop consideration for the supply instalation the volt drop must not exceed 2% of standerd low voltage what size flex is suitabel?

Tuesday, November 23, 2010
INDUCTIN AND MOTORS
Motors:
in some industrial and commercial and majority of domestic situation electrical equipment require rotary motion is supplied by single phase supply. Whilst three phase motors can be modified to run from single phase supply (steinMetz
in domestic applications they are widely used in fridge, washing machines, dryer, hair dryer, cake mixer,etc
in commercials fridges floor polisher etc
in industrial many hand tools, bench grinders, drill pressers,etc
Single phase motors commonly in use today are either:
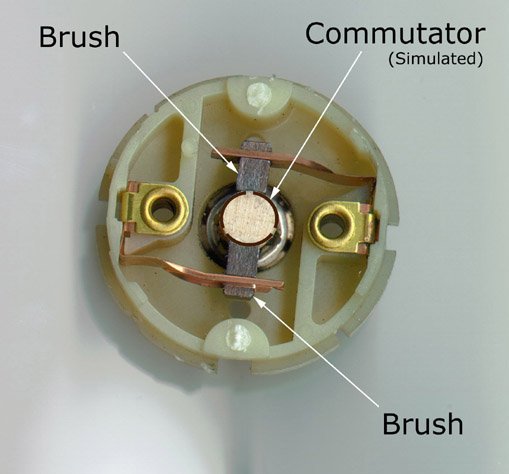
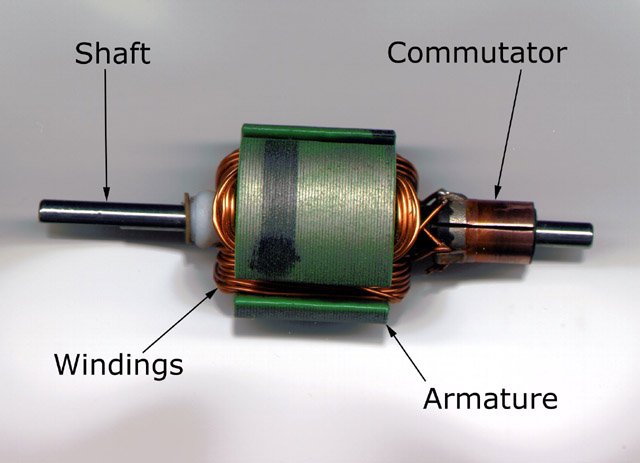
WOUND ROTOR-COMMUTATOR TYPE
SQUIRREL CAGE INDUCTION TYPES.
SINGLE PHASE INDUCTION TYPE
“Split phase “motors
these motors comes in several variants based on the principle that an auxiliary or starting winding is to built in to the stator these windings are positioned between the main windings.
To produce torque in onr direction (or the other) it requires a sweep of flux around the stator pols so that the voltage and current in in the rotor conductor will be in positive direction.
INDUCTION MOTORS
An induction motor is an asynchronous AC motor where power is transferred to the rotor by electromagnetic induction. An induction motor resembles a rotating transformer, because the stator (stationary part) is essentially the primary side of the transformer and the rotor (rotating part) is the secondary side. Polyphase induction motors are widely used in industry.
Induction motors may be further divided into squirrel-cage motors and wound-rotor motors. Squirrel-cage motors have a heavy winding made up of solid bars, usually aluminum or copper, joined by rings at the ends of the rotor. Currents induced into this winding provide the rotor magnetic field. The shape of the rotor bars determines the speed-torque characterstics. At low speeds, the current induced in the squirrel cage is nearly at line frequency and tends to flow in the outer parts of the rotor cage. As the motor accelerates, the slip frequency becomes lower, and more current flows in the interior of the winding. By shaping the bars to change the resistance of the windings portions in the interior and outer parts of the cage, effectively a variable resistance is inserted in the rotor circuit.
In a wound-rotor motor, the rotor winding is made of many turns of insulated wire and is connected to slip rings on the motor shaft. An external resistor or other control devices can be connected in the rotor circuit. Resistors allow control of the motor speed, although significant power is dissipated in the external resistance. A converter can be fed from the rotor circuit and return the slip-freqeuncy power that would otherwise be wasted back into the power system.
The wound-rotor inductin motor is used primarily to start a high inertia load or a load that requires a very high starting torque across the full speed range. By correctly selecting the resistors used in the secondary resistance or slip ring starter, the motor is able to produce maximum torque at a relatively low supply current from zero speed to full speed. This type of motor also offers controllable speed.
Motor speed can be changed because the torque curve of the motor is effectively modified by the amount of resistance connected to the rotor circuit. Increasing the value of resistance will move the speed of maximum torque down. If the resistance connected to the rotor is increased beyond the point where the maximum torque occurs at zero speed, the torque will be further reduced.
When used with a load that has a torque curve that increases with speed, the motor will operate at the speed where the torque developed by the motor is equal to the load torque. Reducing the load will cause the motor to speed up, and increasing the load will cause the motor to slow down until the load and motor torque are equal. Operated in this manner, the slip losses are dissipated in the secondary resistors and can be very significant. The speed regulation and net efficiency is also very poor.
in some industrial and commercial and majority of domestic situation electrical equipment require rotary motion is supplied by single phase supply. Whilst three phase motors can be modified to run from single phase supply (stein
in domestic applications they are widely used in fridge, washing machines, dryer, hair dryer, cake mixer,etc
in commercials fridges floor polisher etc
in industrial many hand tools, bench grinders, drill pressers,etc
Single phase motors commonly in use today are either:
WOUND ROTOR-COMMUTATOR TYPE
SQUIRREL CAGE INDUCTION TYPES.
SINGLE PHASE INDUCTION TYPE
“Split phase “motors
these motors comes in several variants based on the principle that an auxiliary or starting winding is to built in to the stator these windings are positioned between the main windings.
To produce torque in onr direction (or the other) it requires a sweep of flux around the stator pols so that the voltage and current in in the rotor conductor will be in positive direction.
Universal motors
A series-wound motor is referred to as a universal motor when it has been designed to operate on either AC or DC power. The ability to operate on AC is because the current in both the field and the armature (and hence the resultant magnetic fields) will alternate (reverse polarity) in synchronism, and hence the resulting mechanical force will occur in a constant direction.
AC motors
An AC motor has two parts. An stationary stator having coils supplied with AC current to produce a rotating magnetic field, and a rotor attached to the output shaft that is given a torque by the rotating field.INDUCTION MOTORS
An induction motor is an asynchronous AC motor where power is transferred to the rotor by electromagnetic induction. An induction motor resembles a rotating transformer, because the stator (stationary part) is essentially the primary side of the transformer and the rotor (rotating part) is the secondary side. Polyphase induction motors are widely used in industry.
Induction motors may be further divided into squirrel-cage motors and wound-rotor motors. Squirrel-cage motors have a heavy winding made up of solid bars, usually aluminum or copper, joined by rings at the ends of the rotor. Currents induced into this winding provide the rotor magnetic field. The shape of the rotor bars determines the speed-torque characterstics. At low speeds, the current induced in the squirrel cage is nearly at line frequency and tends to flow in the outer parts of the rotor cage. As the motor accelerates, the slip frequency becomes lower, and more current flows in the interior of the winding. By shaping the bars to change the resistance of the windings portions in the interior and outer parts of the cage, effectively a variable resistance is inserted in the rotor circuit.
In a wound-rotor motor, the rotor winding is made of many turns of insulated wire and is connected to slip rings on the motor shaft. An external resistor or other control devices can be connected in the rotor circuit. Resistors allow control of the motor speed, although significant power is dissipated in the external resistance. A converter can be fed from the rotor circuit and return the slip-freqeuncy power that would otherwise be wasted back into the power system.
The wound-rotor inductin motor is used primarily to start a high inertia load or a load that requires a very high starting torque across the full speed range. By correctly selecting the resistors used in the secondary resistance or slip ring starter, the motor is able to produce maximum torque at a relatively low supply current from zero speed to full speed. This type of motor also offers controllable speed.
Motor speed can be changed because the torque curve of the motor is effectively modified by the amount of resistance connected to the rotor circuit. Increasing the value of resistance will move the speed of maximum torque down. If the resistance connected to the rotor is increased beyond the point where the maximum torque occurs at zero speed, the torque will be further reduced.
When used with a load that has a torque curve that increases with speed, the motor will operate at the speed where the torque developed by the motor is equal to the load torque. Reducing the load will cause the motor to speed up, and increasing the load will cause the motor to slow down until the load and motor torque are equal. Operated in this manner, the slip losses are dissipated in the secondary resistors and can be very significant. The speed regulation and net efficiency is also very poor.
Wednesday, October 13, 2010
MOTORS
MOTORS
The fundamental driving force behind all electric motors, whether brushed or brushless, AC or DC, is magnetism. We've probably all played with magnets at some time or other, and have learned about them in science class in elementary school.
Recall that any magnet has a north pole and a south pole (it just so happens that the earth is a magnet whose poles happen to correspond very roughly to the geographical poles, hence the names for the magnet's poles). If you take two bar shaped magnets and line them up, they will be attracted to one another if one's north pole is next to the other's south pole. If you line them up north to north or south to south, they will repel each other. Opposites attract.
{kind=link}
{kind=link}
Induction motor
An induction motor (IM) is a type of asynchronous AC motor where power is supplied to the rotating device by means of electromagnetic induction. Another commonly used name is squirrel cage motor because the rotor bars with short circuit rings resemble a squirrel cage (hamster wheel). An electric motor converts electrical power to mechanical power in its rotor (rotating part). There are several ways to supply power to the rotor. In a DC motor this power is supplied to the armature directly from a DC source, while in an induction motor this power is induced in the rotating device. An induction motor is sometimes called a rotating transformer because the stator (stationary part) is essentially the primary side of the transformer and the rotor (rotating part) is the secondary side. Induction motors are widely used, especially polyphase induction motors, which are often used in industrial drives.
Subscribe to:
Posts (Atom)